近来来,随着自动化程度不断提高,在工人密集的装配工位,逐步由半自动化或自动化的单元设备辅助或代替人工的工作,工人的劳动强度得到减轻,劳动环境得到改善。助力机械手作为应用于各大领域和行业,提高工作效率,减轻工人劳动强度,省时省力的工业搬运设备就是其中之一。
助力机械手基于人机工程学而设计,助力机械手构造型式,具有显著的人机互助特点。结合工件通过改变夹具或吊具形式适用于包/袋,纸盒/箱,油桶,提桶,纸/塑料卷, 空调,冷凝机,压缩机,金属铸件,模具,砂芯和各种汽车零部件包括仪表盘,天窗,轮胎,车门,变速器,汽车底盘,车桥,发动机,发动机缸体等物件搬运方面有着事半功倍的效率。设备结构轻巧,运行安全可靠。
1、系统结构
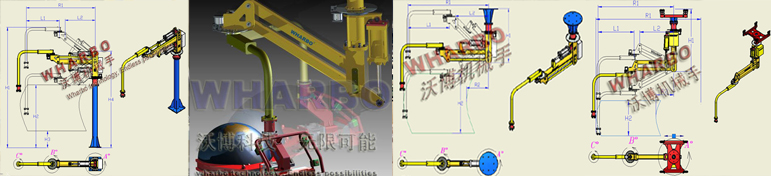
助力机械手结构采用旋转机械臂的结构型式,主要由吊挂纵向移动装置、滑车系统、机械手本体、吊具或夹具、气动控制系统、气路、安全检测系统组成。从安装方式上分为地面正立放置安装、吊挂式安装。
2、机械手本体机械结构
由三个关节回转轴组成,可旋转360度。并任意角度可调。
平行四连杆臂为平行四连杆结构,通过平衡气缸的作用实现机械手的上下升降。
角度调整臂通过回转连通与平行四连杆臂末端相连,补偿平行四连杆臂的角度调整范围。
工艺臂通过回转连通与角度调整臂末端连接,下端通过法兰盘与夹具或吊具相连接。
3、气动控制系统
3.1 增压系统
增压系统消除了工厂气源不稳定因素的影响,保证系统中所需要的压力。
3.2 储气、稳压系统
在气源突然断气状态下,通过储气罐保证操作的顺利完成;
保证气源压力波动时,机械手的平衡状态不会发生漂移。
3.3 平衡系统
保证机械手在空间任意位置平衡静态。
3.4 制动装置
在每一个回转关节上,设置一套制动装置;通过气动锁紧装置,旋转关节轴可锁定。
在机械手闲置时,通过关节锁定,放置于安全位置,把设备对操作工的障碍降至最低。
3.5 按钮站
所有的操作按钮集中在一起在手柄位置,简单方便。
4、专用夹具或吊具
夹具或吊具需要针对不同的工件非标设计,设计中要考虑:
(1)装配工艺位置的适应性;
(2)装卡工件要方便快捷;
(3)释放工件要安全迅速;
(4)对工件的安全防护;
(5)考虑刚性、强度、使用轻便。
5、安全检测装置
在操作现场上,对操作人员、工件的安全防护在设计中要考虑全面,有机械手过位报警、复位、停止作业等功能。
6、设备的特点
6.1 可靠性
(1)设备中关键元器件全部为优质进口产品,可确保设备稳定运行;
(2)助力机械手动作范围大、阻力小、运行平稳、结构精巧、功能齐全、技术指标先进,是现代优质装配助力机械手代表产品之一;
(3)总体方案设计充分考虑了工件及工艺特点,把优质、高效、经济、方便等因素综合考虑,有工艺先进,产品质量好,生产效率高,改善劳动条件等诸多优点;
(4)系统功能齐全,在客户给定工件误差范围内系统均可自动调整。
6.2 柔性
机械手配置功能齐全,完全适应工件设计技术要求,不仅可以顺利完成给定产品的搬运装配任务,还可完成工作范围内的各种不同规格产品的搬运装配。
6.3 安全性
气控系统有很强的保护功能,如制动功能、突然断气保护功能、过线报警功能等多种保护,可确保系统安全工作。
目前,助力机械手已广泛应用于汽车制造、金属制造、纺织、木工、建筑、工业铸造、造纸、包装、机电、航空、化工石油、制药、食品等行业物料搬运装配,设备全部采用气控阀,属无电作业,保证了操作者的安全性。采用气动平衡手动控制代替人工进行工件的搬运,减轻了操作者的劳动强度,提高了工作效率,尤其对于人工不宜搬运的工件,如蓄电池,可以避免蓄电池溶液对人体的伤害,或是高温作业的环境,保障了操作者的身体健康。 |