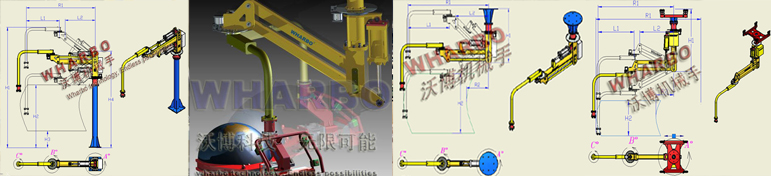
助力机械手是由人工操纵的机械手。使用者手动操作机械手臂完成机械手的上下运动和回转运动等动作,并通过操作气动开关实现夹具的夹持,从而进行工件的搬运,移载,装配等作业。助力机械手巧妙地应用力的平衡原理,使操作者对重物进行相应的推拉提升,就可在空间内省力轻松的平衡移动定位。重物在提升或下降时形成浮动平衡状态。无需熟练的点动操作,只需操作者用手推拉重物,就可以把重物正确地放到空间中要放的任何位置。